Wireless Inertia Motion Capture Suit and Teleoperated Master-Slave Robot
- 2016年6月12日
- 讀畢需時 1 分鐘
When I was a sophomore student, two of my best friends with me designed and implemented the Teleoperated Master-Slave Robot System which using self-developed Inertia Motion Capture Suit, robot mechanical structure and robot embedded control system.
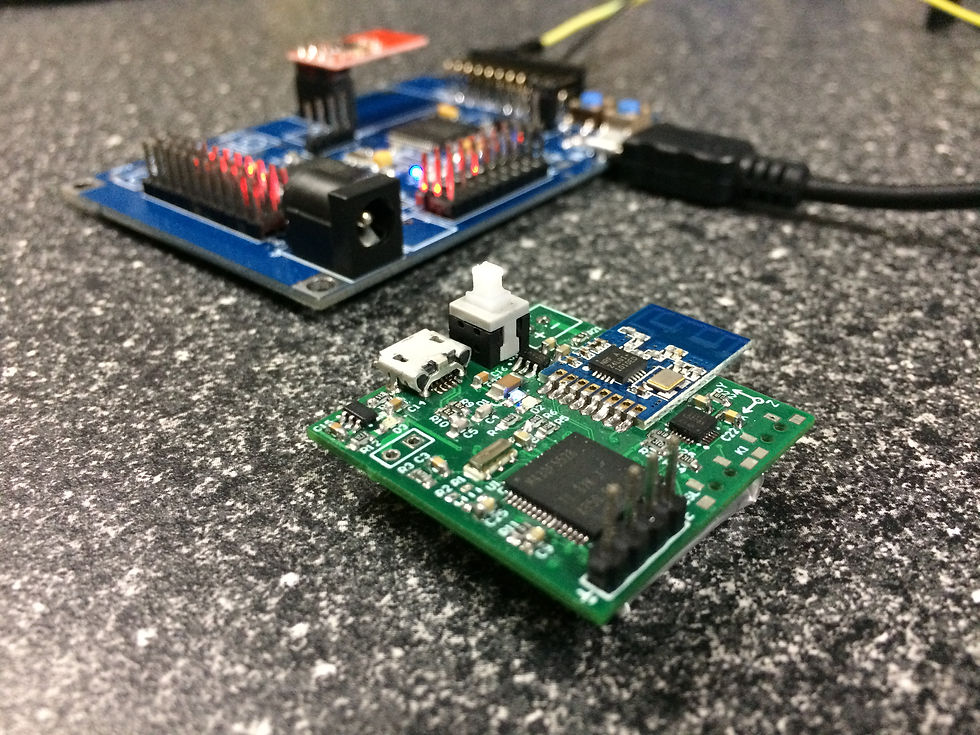
Left side photo is the lasted version of my motion capture module and hub receiver.

The features of our self-developed Inertia Motion Capture Suit has the abilities to operates with up to 21 individual IMU sensor modules(@60fps), all sensor modules are wirelessly connected to the hub and have up to 9 hours battery life.
The Inertia Motion Capture Suit is based on MEMS MARG (Magnetic, Angular Rate, and Gravity) sensors which is a hybrid IMU which incorporates a tri-axis magnetometer. Using Kalman filter as the orientation filter algorithms.




My Inertia Motion Capture Suit also contains a pair self developed wireless data glove. The data glove using MARG sensors to measure the orientation of human hands and using flex sensors to sensing fingers movement. The pictures above are the wireless data glove circuit board and the finished glove wear on a hand.
In the mean time, we also develop a Teleoprate Master-Slave Robot using the Motion Capture suit discussed above. The Robot using quaternion based kinematics to control the joint servo motor. The robot has 25 DOFs. The joint servo actuators are also self designed which using CAN bus for communication and has individual control loops for torque, speed and position.
留言